
Verilog编程-7. 异步FIFO
1. 背景
异步FIFO常用于缓冲不同速率时钟域之间的数据交换,可以使得异时钟域数据传输的时序变得宽松,也提高了不同时钟域之间数据传输的效率。对于异步FIFO来说,由于push和pop分别在不同的时钟域,那么最核心的问题就是空满状态的判断。本文将详细介绍异步FIFO的设计思路,并给出相应的代码。
2. 设计思路
对于空满状态的判断,最常见的思路就是将FIFO中的读指针和写指针进行比较,然而由于多比特数据在跨时钟域传输的时候,很容易由于亚稳态而产生传输错误,所以对于读写指针来说,不可以直接进行跨时钟域传输。格雷码由于相邻数之间只有1比特的差别,这样可以大大减小亚稳态所产生的影响,所以,异步FIFO基本的设计思路是将读写指针转化为格雷码,再进行跨时钟域传输。同时,在跨时钟域传输的过程中,对于跨时钟域信号进行两级寄存器同步,即打两拍,可以有效减少亚稳态产生的影响。综上可得,异步FIFO跨时钟域信号传输的基本思路是:两级寄存器同步加上格雷码。同时,我们还需要理清一个思路,那就是需要将写时钟域的写指针同步到读时钟域,将同步后的写指针与读时钟域的读指针进行比较产生空信号;将读时钟域的读指针同步到写时钟域,将同步后的读指针与写时钟域的写指针进行比较产生满信号。即在读时钟域产生读空信号,在写时钟域产生写满信号。
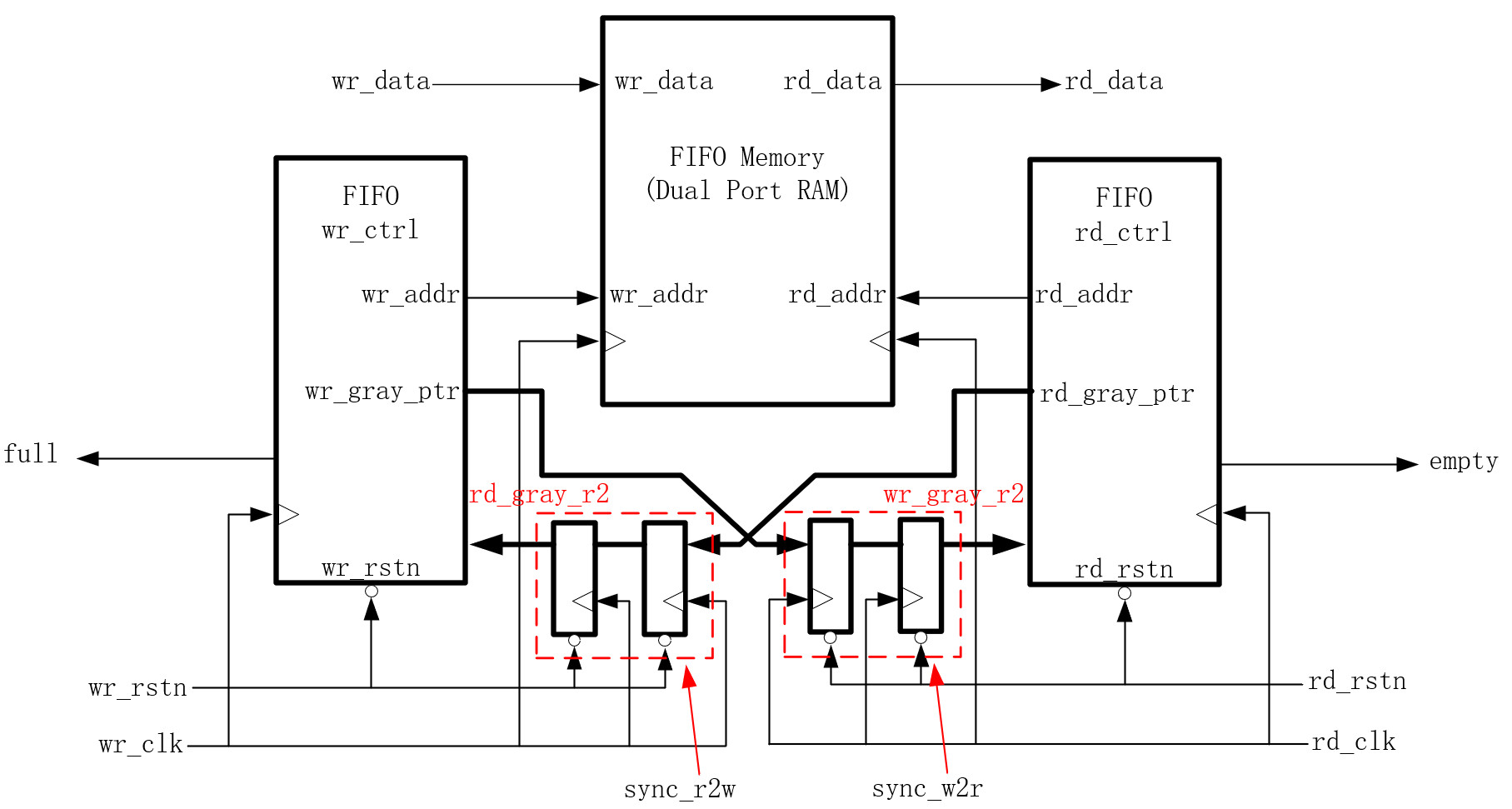
上图是根据以上设计思路得到的FIFO设计结构图,其基本组成包括一个双端口RAM组成FIFO的存储主体,FIFO的读控制器,FIFO的写控制器。在读写控制器内,分别将读指针和写指针转化为格雷码,再通过sync_r2w和sync_w2r两个同步器,分别同步到写时钟域和读时钟域,这是整个设计的关键点。在格雷码分别同步到对方时钟域时,再和对方时钟域中的格雷码进行比较,则可以在写控制器中产生写满信号,在读控制器中产生读空信号。读写时钟域的时钟信号和复位信号则分别控制着两个同步器。读写控制器还分别产生读地址和写地址信号,进而在FIFO memory中读出数据和写入数据。
还需要注意一点的是,读写指针的实际宽度比FIFO的深度要多1个比特,通过这样的比特扩展,就可以很方便地进行格雷码的直接比较,进而得出FIFO的空满状态。
同时还需要注意到,FIFO memory中的地址是二进制,而跨时钟域进行比较的是该二进制比特扩展后再转化的格雷码。而具体的二进制转换为格雷码的方法,以及格雷码如何进行比较,可见下面的代码中。
3. 代码
整个工程主体为源文件fifo_async.v,仿真文件fifo_async_tb.v,Makefile文件makefile。编辑平台是 vscode, 仿真平台是 vcs, 使用 verdi 软件观察波形。具体如下所示:
fifo_async.v
module fifo_async #(
parameter DATA_WIDTH = 32,
// 此处深度为 2^6,即64个
parameter FIFO_DEPTH = 6
)
(
input wr_clk, wr_rstn, rd_clk, rd_rstn, rq, wq,
input [DATA_WIDTH-1:0] wr_data,
output reg [DATA_WIDTH-1:0] rd_data,
output full, empty
);
// 设置FIFO
reg [DATA_WIDTH-1:0] fifo [0:(1<<FIFO_DEPTH)-1];
// 读写指针,及其更新
reg [FIFO_DEPTH:0] wr_ptr, rd_ptr;
always @(posedge rd_clk or negedge rd_rstn) begin
if (!rd_rstn)
rd_ptr <= 0;
else if (rq && !empty)
rd_ptr <= rd_ptr + 1;
end
always @(posedge wr_clk or negedge wr_rstn) begin
if (!wr_rstn)
wr_ptr <= 0;
else if (wq && !full)
wr_ptr <= wr_ptr + 1;
end
wire [FIFO_DEPTH:0] wr_gray_ptr, rd_gray_ptr;
// 格雷码产生
assign wr_gray_ptr = (wr_ptr >> 1) ^ wr_ptr;
assign rd_gray_ptr = (rd_ptr >> 1) ^ rd_ptr;
// 空判断,在读时钟域中两级同步写指针
reg [FIFO_DEPTH:0] wr_gray_ptr_r1;
reg [FIFO_DEPTH:0] wr_gray_ptr_r2;
always @(posedge rd_clk or negedge rd_rstn) begin
if (!rd_rstn)
{wr_gray_ptr_r2, wr_gray_ptr_r1} <= 0;
else
{wr_gray_ptr_r2, wr_gray_ptr_r1} <= {wr_gray_ptr_r1, wr_gray_ptr};
end
// 空判断,读写指针的格雷码相同
assign empty = (rd_gray_ptr == wr_gray_ptr_r2);
// 满判断,在写时钟域中两级同步读指针
reg [FIFO_DEPTH:0] rd_gray_ptr_r1;
reg [FIFO_DEPTH:0] rd_gray_ptr_r2;
always@(posedge wr_clk or negedge wr_rstn) begin
if (!wr_rstn)
{rd_gray_ptr_r2, rd_gray_ptr_r1} <= 0;
else
{rd_gray_ptr_r2, rd_gray_ptr_r1} <= {rd_gray_ptr_r1, rd_gray_ptr};
end
// 满判断,读写指针的格雷码高两位相反,其他低位相同
assign full = (wr_gray_ptr[FIFO_DEPTH:FIFO_DEPTH-1] == ~rd_gray_ptr_r2[FIFO_DEPTH:FIFO_DEPTH-1]) &&
(wr_gray_ptr[FIFO_DEPTH-2:0] == rd_gray_ptr_r2[FIFO_DEPTH-2:0]);
// 读数据,此处rd_addr为rd_ptr的低(FIFO_DEPTH-1)位
wire [FIFO_DEPTH-1:0] rd_addr;
assign rd_addr = rd_ptr[FIFO_DEPTH-1:0];
always @(posedge rd_clk or negedge rd_rstn) begin
if (!rd_rstn)
rd_data <= 0;
else if (rq && !empty)
rd_data <= fifo[rd_addr];
else
rd_data <= 0;
end
// 写数据,此处wr_addr为wr_ptr的低(FIFO_DEPTH-1)位
wire [FIFO_DEPTH-1:0] wr_addr;
assign wr_addr = wr_ptr[FIFO_DEPTH-1:0];
always @(posedge wr_clk or negedge wr_rstn) begin
if (wq && !full)
fifo[wr_addr] = wr_data;
end
endmodule
fifo_async_tb.v
module fifo_async_tb;
reg wr_clk,wr_rstn;
reg rd_clk,rd_rstn;
reg wq,rq;
reg [31:0] wr_data; // data input to be pushed to buffer
wire [31:0] rd_data; // port to output the data using pop.
wire empty, full; // buffer empty and full indication
fifo_async #( .DATA_WIDTH(8),
.FIFO_DEPTH(3))
fifo_inst(
.rd_clk (rd_clk),
.rd_rstn (rd_rstn),
.rq (rq),
.wr_clk (wr_clk),
.wr_rstn (wr_rstn),
.wq (wq),
.wr_data (wr_data),
.rd_data (rd_data),
.full (full),
.empty (empty)
);
always #10 wr_clk = ~wr_clk;
always #20 rd_clk = ~rd_clk;
reg [7:0] tempdata = 0;
initial begin
rd_clk = 0;
wr_clk = 0;
#5000 $finish;
end
initial begin
wr_rstn = 1;
#2;
wr_rstn = 0;
#60;
wr_rstn = 1;
end
initial begin
rd_rstn = 1;
#2;
rd_rstn = 0;
#120;
rd_rstn = 1;
end
always @(posedge wr_clk or negedge wr_rstn)
begin
if(wr_rstn==1'b0)
wq <= 0;
else
wq <= $random;
end
always @(posedge rd_clk or negedge rd_rstn)
if(rd_rstn==1'b0)
rq <= 0;
else
rq <= $random;
always@(*)
if(wq == 1)
wr_data= $random;
else
wr_data = 0;
initial
begin
$fsdbDumpfile("fifo_async.fsdb");
$fsdbDumpvars();
end
// 用于观察FIFO中的数值
wire [7:0] fifo_0;
assign fifo_0 = fifo_inst.fifo[0];
wire [7:0] fifo_1;
assign fifo_1 = fifo_inst.fifo[1];
wire [7:0] fifo_2;
assign fifo_2 = fifo_inst.fifo[2];
wire [7:0] fifo_3;
assign fifo_3 = fifo_inst.fifo[3];
wire [7:0] fifo_4;
assign fifo_4 = fifo_inst.fifo[4];
wire [7:0] fifo_5;
assign fifo_5 = fifo_inst.fifo[5];
wire [7:0] fifo_6;
assign fifo_6 = fifo_inst.fifo[6];
wire [7:0] fifo_7;
assign fifo_7 = fifo_inst.fifo[7];
endmodule
Makefile
.PHONY: sim, verdi, clean
PROJECT = fifo_async
VCS = vcs \
-R \
-timescale=1ns/1ns \
-debug_all \
-fsdb \
+define+FSDB \
-full64 \
+v2k \
-sverilog \
VERDI = verdi \
-sv \
-nologo \
-ssf ${PROJECT}.fsdb \
sim:
make clean
${VCS} -f ${PROJECT}.f
verdi:
${VERDI} -f ${PROJECT}.f &
clean:
rm -rf ./csrc ./DVEfiles *.daidir *.log simv* *.key *.vpd \
verdi* novas* *.fsdb
fifo_async.f
./fifo_async.v
./fifo_async_tb.v
4. 仿真结果
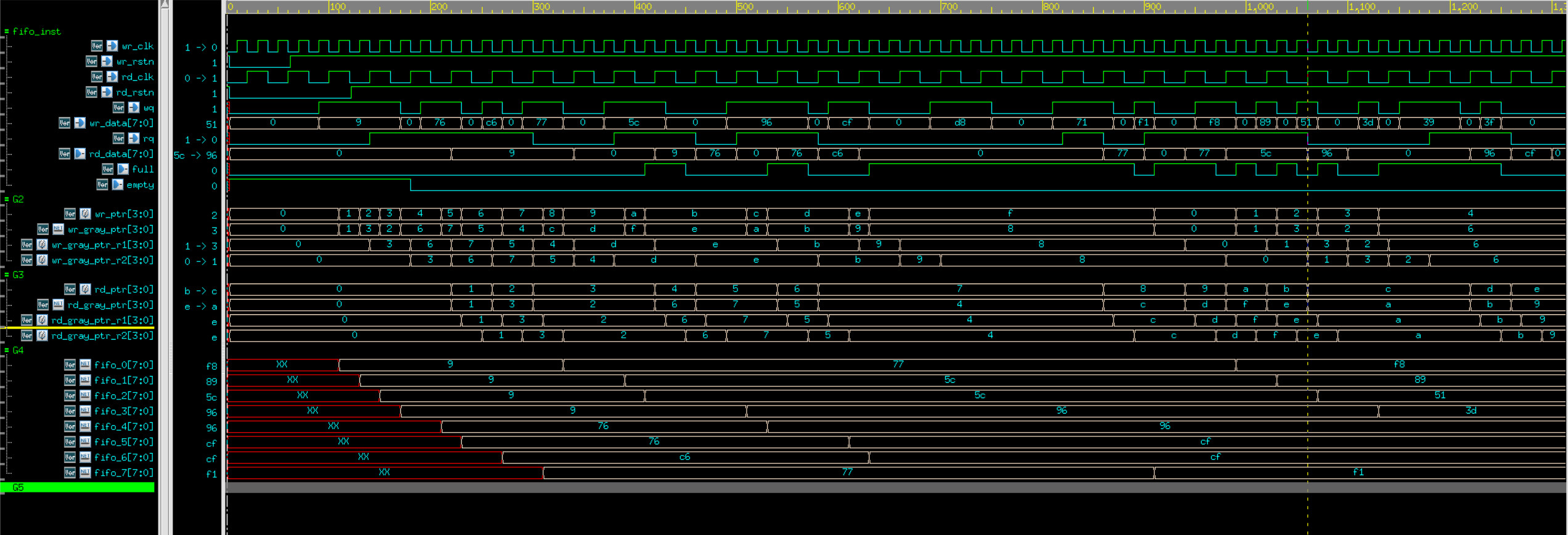
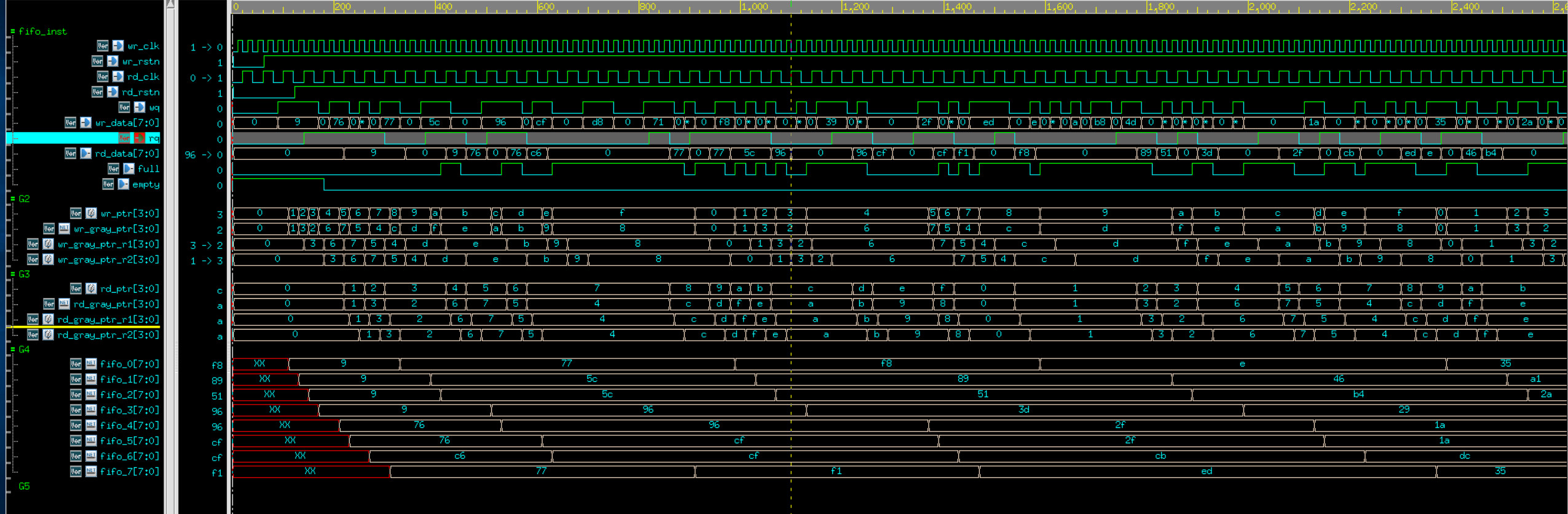
下图是仿真产生的波形图。由图中可知,FIFO memory中可以顺利写入和读出数据,空满信号产生正常。整体设计功能正常。
文档信息
- 本文作者:Polaris
- 本文链接:https://polaris-chn.github.io/2022/04/25/Verilog-practice-7/
- 版权声明:自由转载-非商用-非衍生-保持署名(创意共享3.0许可证)